Robot Creator Extension Documentation
Welcome to the Creator for Robot Developer Extensions! This extension provides AI-powered tools to streamline ROS 2 package development across multiple programming languages. This extension works with your existing Copilot subscription with prompts specifically crafted for specific ROS 2 development scenarios.
NOTE: AI Generated code may not always be correct or optimal. Always review and test generated code thoroughly. If you have issues or improvements for the templates, please submit an issue or pull request on GitHub.
Getting Started
Installation
- Open VS Code
- Go to Extensions (
Ctrl+Shift+X/Cmd+Shift+X) - Search for "RDE ROS 2 Creator"
- Click Install
Requirements
- ROS 2: Humble, Iron, Jazzy, or Kilted
- VS Code: Latest version (1.101.0 or higher)
- GitHub Copilot: Required for AI features
Quick Start
- Open a ROS 2 workspace in VS Code
- Right-click on your ROS 2 workspace's
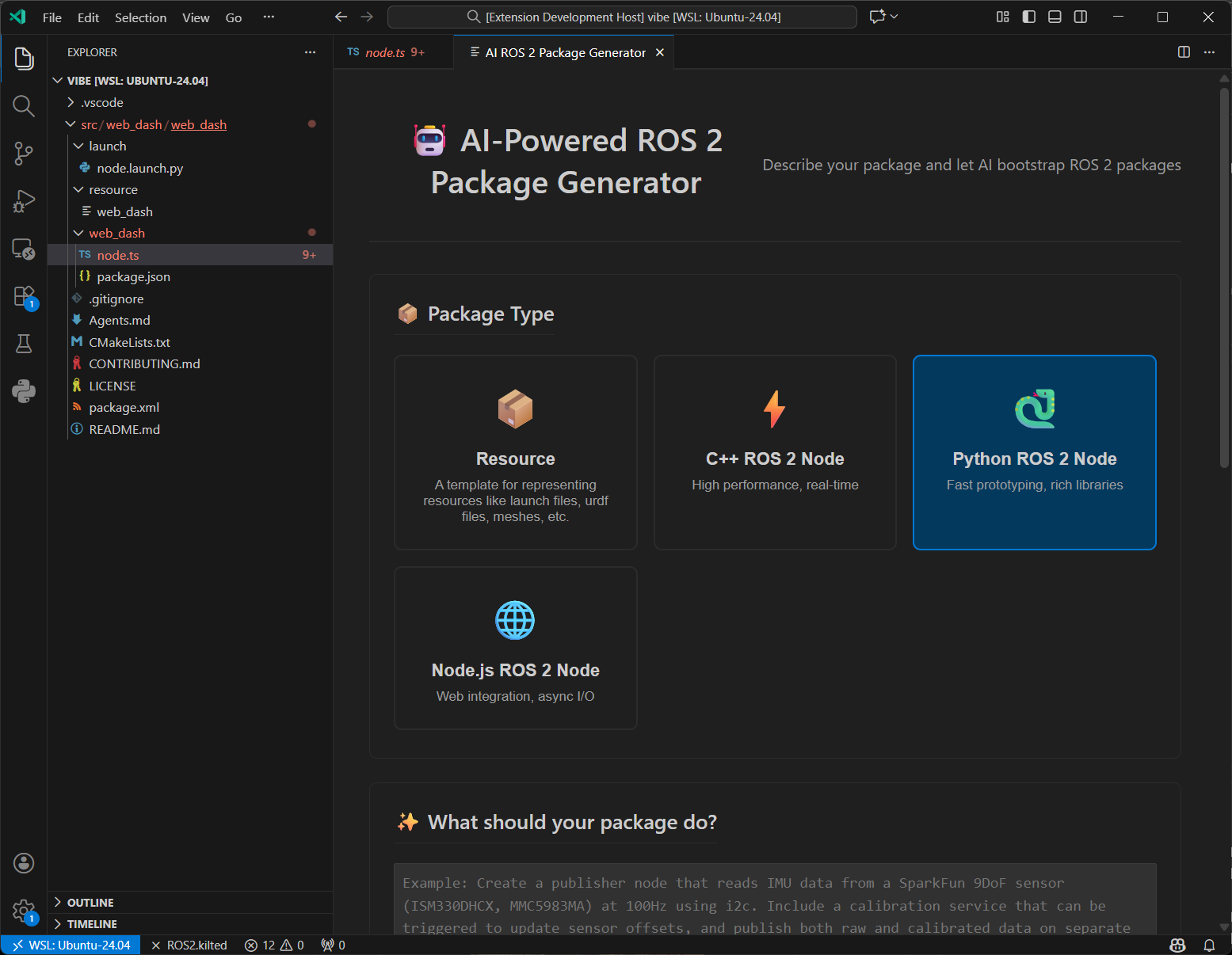
srcdirectory in Explorer → "Create ROS 2 Package" - Choose your template and configure options
- Use natural language to describe your node (optional)
- Generate and build your package
Having issues? Check our troubleshooting guide.
Building and Testing
Robot Developer Extensions for ROS 2
Select ctrl+shift+b and run Colcon: Colcon Build Debug to build your workspace.
Standard ROS 2 Workflow
# Source ROS 2
source /opt/ros/kilted/setup.bash
# Build the package
colcon build --packages-select your_package
# Source the workspace
source install/setup.bash
# Run tests
colcon test --packages-select your_package
colcon test-result --verbose
Planned work
Rust ROS 2 Package
- Safe, concurrent systems programming
- Modern Rust features
- Integration with ROS 2 via rclrs
- Testing with Rust's built-in framework
Micro-ROS Package
- Embedded systems support
- Real-time capabilities
- Integration with micro-ROS libraries
- Lightweight communication patterns
Simulation Package
- Gazebo integration
- RViz configurations
- Simulation-ready launch files
- Sensor and actuator plugins
- Testing with simulation scenarios
Dockerized Package
- Containerized ROS 2 environments
- Dockerfile templates
- Docker Compose configurations
- CI/CD pipeline examples
Discussions
Github Discussions are provided for community driven general guidance, walkthroughs, or support.
Sponsor
If you find this extension useful, please consider sponsoring Ranch Hand Robotics to help support the development of this extension and other open source projects.
License
This extension is licensed under the MIT License. Template-generated code follows the license specified during package creation.